主题:弱智就别出来科普了——论微单片上相位对焦的优越性
正序浏览
主题图片汇总
主题内检索
(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
1048 帖
(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
1047 帖
(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
1046 帖
(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
1045 帖
(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
1044 帖
(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
1043 帖
(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
1042 帖


(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
1041 帖

(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
1040 帖
 要不早就有同学出来给讲课了。那个波兰人的论文写的好像就是这个事儿吧?...
要不早就有同学出来给讲课了。那个波兰人的论文写的好像就是这个事儿吧?...
(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
1039 帖
(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
1037 帖

(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
1036 帖
(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
1035 帖
(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
1034 帖
(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
1033 帖
(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
1032 帖
(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
1031 帖
(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
1030 帖
(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
1029 帖
(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
1028 帖
(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
1027 帖
(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
1026 帖
(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
1025 帖
(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
1024 帖
(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
1023 帖
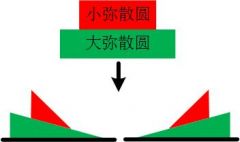
 这个要求太高了。刚才我说的污染借楼主的图来说明一下,一排对焦象素接收到的信号是这样叠加的。楼主这个图的情...
这个要求太高了。刚才我说的污染借楼主的图来说明一下,一排对焦象素接收到的信号是这样叠加的。楼主这个图的情...
(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
1022 帖
(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
1021 帖
(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
1020 帖
(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
1019 帖
(0)
(0)
只看该作者
不看该作者
加入黑名单
举报
返回顶部
个人图文集
个人作品集
第
1018 帖
回复主题: 弱智就别出来科普了——论微单片上相位对焦的优越性
功能受限
游客无回复权限,请登录后再试